基于模糊描述符系统的新型鲁棒最优控制器
非线性系统在从机器人到经济学的许多不同领域都有应用。与线性系统不同,此类系统的输出与输入不成正比。一个典型的例子是钟摆的运动。由于非线性系统的固有性质,其数学建模和控制都很困难。
在这种背景下,Takagi–Sugeno(T–S)模糊系统作为一种高效的工具应运而生。该系统利用模糊逻辑来映射输入和输出值,将非线性系统近似为更容易建模的多个线性系统。
模糊逻辑是数理逻辑的一种形式,其中真值可以是0到1之间的任何值,而不是要求所有陈述都为真(1)或假(0)。T-S模糊系统因此充当了多种非线性控制方法的基础,其中并行分布式补偿器(PDC)方法是最突出的。
此外,科学家们还开发了该系统的增强版本,称为模糊描述符系统(FDS)。它将T-S模糊系统与强大的空间状态表示相结合,用状态变量、输入变量和输出变量来描述物理系统。
尽管进行了广泛的研究,但T-SFDS背景下的最优控制策略仍然很大程度上未被探索。此外,虽然已经使用线性矩阵不等式(LMI)等方法探索了T-SFDS的鲁棒控制方法,以防止干扰,但这些方法带来了额外的复杂性和优化挑战。
为了克服这些限制,由日本芝浦理工学院工程学院创新全球项目副教授Ngoc-TamBui领导的一组研究人员,包括Thi-Van-AnhNguyen、Quy-ThinhDao和来自河内科技大学的Duc-BinhPham基于T-S模糊描述符模型开发了新型最优控制器和鲁棒最优控制器。他们的研究发表在《科学报告》杂志上。
为了开发控制器,团队首先利用强大的李亚普诺夫稳定性理论来建立FDS数学模型的稳定性条件。然而,这些稳定性条件不能直接使用。正如Bui博士所解释的那样,“FDS模型的稳定性条件使得使用现有的数学工具很难求解。为了使它们更易于使用,我们系统地将它们转换为LMI。”
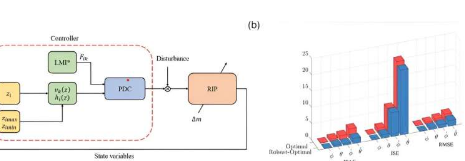
这些修改的条件构成了开发三种控制器的基础:使用PDC来管理偏差的稳定性控制器、最小化成本函数以获得最优控制的最优控制器以及结合了两者优点的鲁棒最优控制器。
研究人员展示了这些控制器在控制旋转倒立摆方面的有效性,这是一个具有挑战性的系统,由位于旋转底座上的倒立摆组成。问题是通过控制底座的旋转来保持钟摆直立。
研究人员使用不同的模拟场景测试了控制器的性能。仿真结果表明,初始位移角较小时,稳定性控制器能有效稳定系统,而初始角较大时,系统振荡较多,稳定时间较长。
最佳控制器有效解决了较长的稳定时间问题,将其从13秒减少到2秒,减少了六倍。此外,它还降低了振荡期间的最大幅度。
使用两种不同的场景对鲁棒最优控制器进行了测试。在第一种情况下,摆杆的质量发生了变化,而在第二种情况下,控制输入中引入了白噪声。与最优控制器相比,它在第一个场景中的表现相同。然而,控制器在第二种情况下要好得多,没有显示出振荡,而最佳控制器显示出明显的振荡。值得注意的是,鲁棒最优控制器显示出最低的误差值。
这些结果凸显了这些控制器在实际场景中的适应性和潜力。Bui博士表示:“研究结果对各种现实生活应用具有良好的意义,在这些应用中,动态和不确定环境中的稳定控制至关重要。具体来说,自动驾驶车辆和工业机器人可以使用所提出的控制器实现增强的性能和适应性。”
“总的来说,我们的研究为推进各个领域的控制策略开辟了道路,最终有助于打造更强大的自主系统,使交通更安全,医疗保健更有效,制造更高效。”
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。