受沙堆流动和刚性行为启发的自组织机器人骨料设计
芝加哥大学和诺伊理工学院的研究人员最近开发了Granulobot,这是一种新型模块化机器人系统,可以改变其物理形状以最好地导航不同的环境。
该系统在《科学机器人》中引入,其灵感来自于鸟群、鱼群和其他群体自组织集体行为的能力,以及沙堆(即颗粒材料)的软适应特性。
“虽然机器人技术项目通常是由应用程序驱动的,但这项工作是从更基本的角度出发的,探索控制计算的新范式,利用自组织物理学来设计更具适应性和更高效的系统,并具有&luo;人工生命&ruo;的前景,该论文的主要作者BaudouinSaintyves告诉TechXplore。
“我是一名物理学家、工程师和艺术家,拥有模式形成和机器人技术作为媒介方面的专业知识。我对探索非生命系统中类似生命的特性的出现感兴趣。”
作为最近研究的一部分,研究人员着手开发一种可以快速调整其形状以在不同环境中移动的机器人。他们设计的机器人建立在芝加哥大学Jaeger实验室之前的工作基础上,该实验室专注于软颗粒物质(例如沙堆和玉米淀粉悬浮液)的物理学,以及Saintyves对在机器人中复制物理模式的迷恋。
“与工程中常见的自上而下的问题解决方法相比,我们采用的是自下而上的方法,在实验物理学中更常见,”桑蒂维斯说。“我们询问非常简单的粒状构建块的组装,例如一堆沙子中的颗粒,当这些颗粒增强了驱动能力时,如何能够产生新的智能属性。
“类似于组织中的细胞或鸟类一起旋转,通过设计可以自组织并可以利用颗粒聚集体的显着特性的系统,我们可以在模块化机器人系统中体现一种新兴的&luo;智能&ruo;形式。”
Saintyves和他的同事一直在尝试生产“智能”机器人系统,这些系统从物理原理而不是机器学习和其他数字计算中获取智能。由于机器学习算法和其他复杂计算的计算要求很高,因此这些系统可以表现出较低的功耗,从而延长电池寿命。
Saintyves多年来一直在研究自然界中的图案是如何出现的,对凝胶、颗粒和粘弹性材料等软材料的自组织特性非常感兴趣。他的研究从物理角度以及更艺术的角度探讨了这些现象。
“自组织塑造了我们周围的自然世界,”他说。“与进化等其他基本原理相结合,它仅仅通过我们之前的物理力量就产生了生命和智慧,并且可以在从DNA自组装或组织中的细胞到蚁群或一起旋转的鸟类的各种尺度上观察到。
“作为芝加哥大学的访问艺术家和当代艺术中心的驻场艺术家,我开发了一种现场电影表演,利用自组织作为&luo;木偶&ruo;上演新兴的生活。在这个项目中,我建造了我的第一个机器人系统。”
他对“人工生命”的迷恋最终将Saintyves吸引到了机器人领域,并鼓励他与詹姆斯·弗兰克研究所的机器人学家和软物质物理专家HeinrichJaeger展开合作。Jaeger一直在研究沙堆、玉米淀粉悬浮液和其他颗粒材料,对其在机器人技术中的潜在应用感兴趣。
“Granulobots的设计展示了一种通用控制方法,该方法利用软材料(此处为颗粒材料)的高度适应性特性,具有液体或固体响应,并将它们与自组织原理相结合,”Saintyves说。
在他们的论文中,研究人员介绍了一种新形式的体现智能系统。该系统旨在仅利用物理原理来调整其身体结构,而不依赖于任何数字计算。
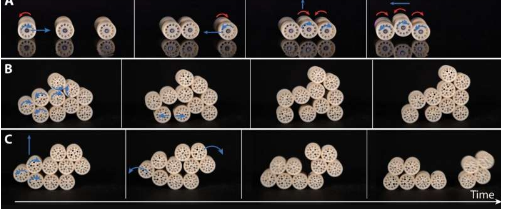
“设计能够改变形状和灵活性以适应各种环境的机器人系统仍然是一项重大的工程挑战,”桑蒂维斯说。“为了解决这个问题,我们推出了Granulobots,这是一种可自我重构的机器人系统,其灵感来自颗粒物质的高度适应性特性。将其想象为一组连接形成聚集体的颗粒的集合,类似于湿沙堆,但现在具有机动颗粒。”
Saintyves和他的同事设计的Granulobots是小型系统,可以通过向彼此施加扭矩来结合、分离和产生不同的结构。机器人的自组织能力使它们能够不断适应和变形,就像液体或固体材料一样,
所有Granulobot中设置的本地控制参数使它们能够自我协调其运动,以对不同的环境条件产生合适的聚合运动方式,而无需接收来自中央计算机的任何输入。因此,它们的运动是机械相互作用的产物。
桑蒂维斯说:“聚合体可以&luo;流动&ruo;越过障碍物,并自我协调在光滑的表面上滑动,或者在防滑地面上爬行和滚动,而无需机器人之间的通信。”“该设计展示了一种基于机械反馈而不是复杂的电子设备和传感器的控制计算形式,推动了具有变形和适应各种功能和条件能力的弹性机器人系统的开发。”
Saintyves和他的合作者引入的创新机器人设计采用简单的分散控制框架,使各种卓越特性能够在一个身体中共存。其基本原理为创建智能机器人提供了有趣的机会,模糊了群体机器人、软机器人和模块化机器人之间的界限。
Saintyves说:“这项工作为控制计算的新范式开辟了可能性,这种范式在设计上更能适应环境变化,数字计算和能源足迹更小。”“&luo;材料就是机器&ruo;这一原则引发了人们对顺从机制的激动人心的研究,其中精心设计的超材料可以表现出类似机器的特性,我们采取了相反的立场:&luo;机器就是材料&ruo;。”这一原理被自然界广泛应用,以有效地体现智能。”
研究人员在各种初始测试中展示了他们的设计的潜力,这些测试证明了其自主协调机器人运动并以最少的数字计算适应不断变化的环境的能力。在接下来的研究中,他们计划进一步改进Granulobots,以支持自主决策和参数的分散优化,以确定最佳运动步态。
这些改进可以让机器人自主识别最佳运动步态来导航特定环境,然后在条件变化时在步态之间切换。
“这不是一个难以实现的目标,因为分散控制策略过去已经在群体机器人系统中实施,但它们基于可以本地编程的代理行为,”桑蒂维斯说。“回到我在开始这个项目时提出的最初问题,&luo;非常简单的颗粒构建块的组装,例如一堆沙子中的颗粒,当这些颗粒增强了驱动能力时,如何能够产生新的智能属性,&ruo;在这里,很自然地会问,在实施决策或更复杂的学习集体属性时,这种代理行为可以是多么最小化和物理化。”
在未来的工作中,Sintyves和他的同事还计划创建一个基于三维(3D)Granulobot的系统。这可以通过创建由更复杂的2DGranulobots集合组成的机器人单元或通过设计其模块化机器人的球形版本来完成。
“我预计这些功能将会出现新的有趣的物理现象,进而带来利用机械形式的控制计算的新机会,”Saintyves补充道。“最后,设计一个仅具有所需属性的最佳系统将使我们能够小型化并开发出更连续的机器人物质形式。科幻角色,例如《终结者》中的T-1000或《蜘蛛侠》中的沙人将变得更接近现实。”
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。