测试机器人模仿人类动作的无监督深度学习模型
能够实时密切模仿人类动作和动作的机器人可能非常有用,因为它们可以学习以特定方式完成日常任务,而无需对这些任务进行广泛的预编程。虽然在过去的几年里,模仿学习的技术有了很大的进步,但它们的性能往往因机器人的身体和人类用户的身体之间缺乏对应性而受到阻碍。
巴黎ENSTAU2IS的研究人员最近推出了一种新的基于深度学习的模型,可以提高人形机器人系统的运动模仿能力。该模型在arXiv上预先发表的一篇论文中提出,将运动模仿分为三个不同的步骤,旨在减少过去报告的人机对应问题。
“这项早期研究工作旨在通过将关节位置序列从人类运动领域转换为给定机器人可实现的运动领域(从而受到其具体化的限制)来改进在线人类机器人模仿,”LouisAnnabi,ZiqiMa,SaoMaiNguyen在他们的论文中写道。“利用深度学习方法的泛化能力,我们通过提出一种执行域到域翻译的编码器-解码器神经网络模型来解决这个问题。”
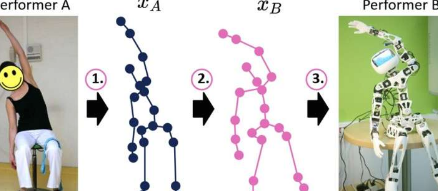
Annabi、Ma和Nguyen开发的模型将人机模仿过程分为三个关键步骤,即姿态估计、运动重定向和机器人控制。首先,它利用姿势估计算法来预测支撑人类代理所展示的运动的骨骼关节位置序列。
随后,模型将预测的骨架关节位置序列转换为机器人身体可以实际产生的相似关节位置。最后,这些转换的序列用于规划机器人的运动,理论上产生可以帮助机器人执行手头任务的动态运动。
研究人员在论文中写道:“为了训练这样的模型,人们可以使用成对的相关机器人和人类动作,但这种成对的数据在实践中极其罕见,而且收集起来很乏味。”“因此,我们转向深度学习方法来进行不配对的域到域翻译,我们采用这种方法来执行人类机器人的模仿。”
Annabi、Ma和Nguyen在一系列初步测试中评估了他们模型的性能,并将其与不基于深度学习的重现关节方向的更简单方法进行了比较。他们的模型没有达到他们希望的结果,这表明当前的深度学习方法可能无法成功地实时重新定位运动。
研究人员现在计划进行进一步的实验,以确定他们的方法的潜在问题,以便他们能够解决这些问题并调整模型以提高其性能。该团队迄今为止的研究结果表明,虽然无监督深度学习技术可用于在机器人中实现模仿学习,但其性能仍然不足以部署在真实的机器人上。
“未来的工作将在三个方向上扩展当前的研究:如上一节所述,进一步调查当前方法的失败,创建来自人类-人类模仿或机器人-人类模仿的配对运动数据的数据集,并改进模型架构以获得更准确的重定向预测,”研究人员在他们的论文中总结道。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。