研究人员开发用于机器人的非接触式触摸传感器
用于机器人和其他仿生(仿生)应用的全新类型触摸传感器非常灵敏,即使传感器与被检测物体之间没有直接接触也能工作。它可以感应物体与传感器之间电场的干扰,距离物体最远100毫米。
中国青岛大学的研究人员与中国其他地方和韩国的合作者在《先进材料科学与技术》杂志上描述了他们的创新。
电子皮肤已成为仿生机器人的关键要素,使它们能够及时检测外部刺激并做出反应。这可以让机器人系统分析物体的形状,如果需要,还可以拾取并操纵它。
大多数当前系统中的传感器依赖于直接触摸,导致接触层发生物理变形,从而导致电容变化。不幸的是,对不同区域响应的一致性限制了此类系统的灵敏度和整体能力。
青岛大学团队的李新林说:“为了带来更高的灵敏度和多功能性,我们开发了新型复合薄膜,其具有令人惊讶且非常有用的电性能。”
当研究人员将两种具有高介电常数的材料(衡量它们对电场响应的指标)结合起来时,最令人惊讶的方面出现了。这种复合材料具有出乎意料的低介电常数,这是一种违反直觉的结果,非常适合制造对电场更敏感的传感器。
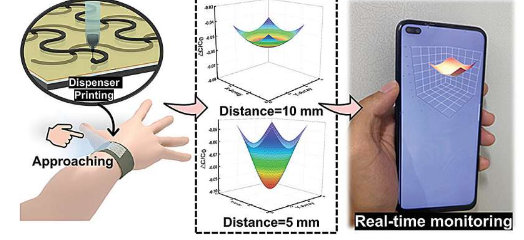
该复合材料由添加到聚二甲基硅氧烷中的少量石墨氮化碳组成。它可以通过一种称为点胶印刷的特定3D打印方法来制造和加工,该方法可以对打印的高粘度墨水的结构和图案进行精细控制。
该团队利用它制作了一个网格,可以感知距离物体表面5到100毫米的物体。他们通过使用研究人员的手指作为被检测的物体来测试网格的功能,当手指靠近网格但没有实际接触时。
“在多次使用周期中的灵敏度、响应速度和稳健稳定性方面,其性能非常出色,”Li说。“这为可穿戴物体和电子皮肤领域开辟了新的可能性。”
她补充说,它适合制造可穿戴技术所需的物理柔性传感器。这些可以应用于医疗监控,或者快速发展的“物联网”(IoT)中更普遍的用途,包括远程控制各种设备。
将传感网格整合到印刷电路板中,使其收集的数据可以通过手机广泛使用的4G网络进行传输。
该团队现在计划完善该技术,以使其适合大规模生产。他们还想探索除了检测形状和运动之外的更多可能性。
例如,传感器阵列中的不同单元具有顺序响应的能力,这为实现手势识别等人机交互提供了可能。接触式和非接触式系统中传感器的性能也体现了它们在人体运动检测方面的潜力,例如避障和步态监测,可应用于智能医疗。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。